
透視図法|パース
デザインの依頼で、ロボットを描く必要性があり、立体的な図というのは、どう描くべきか探っていたところ、ついに透視図法をするべきことになった。
パース:perspectiveというらしく、立体感、つまりは遠近感を出して描画する方法のこと。よく絵画の解説なんかで聞いていたし、イラレで間違えて触った時に出る立体グリッドも知っていたけれど、こういう機会がないと取り組まないもんだと、機会に感謝。
何も分からずロボットをイラレに起こしてみると、
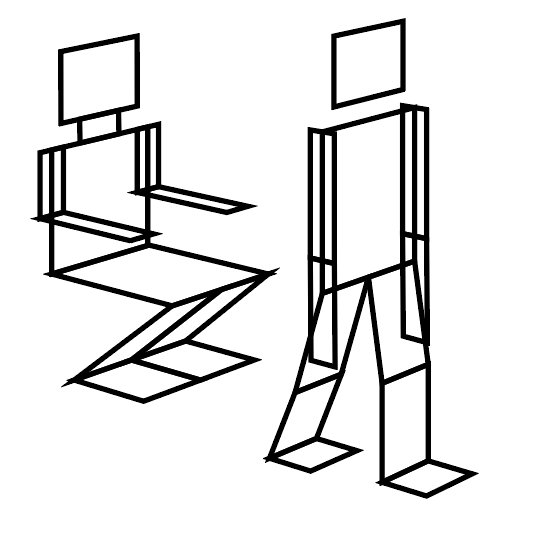
これをどうやって立体にすればいいんだ、という疑問から始まった。
ロボットなんて、普段絶対選択しない対象だし、ガンダムとかエヴァとか知らないから、注目することもない。レゴブロックくらいしかじっくり見たことがないので、とりあえず注文の「人型ロボット」を作成。とても立体にならないので勉強。
平面図・側面図
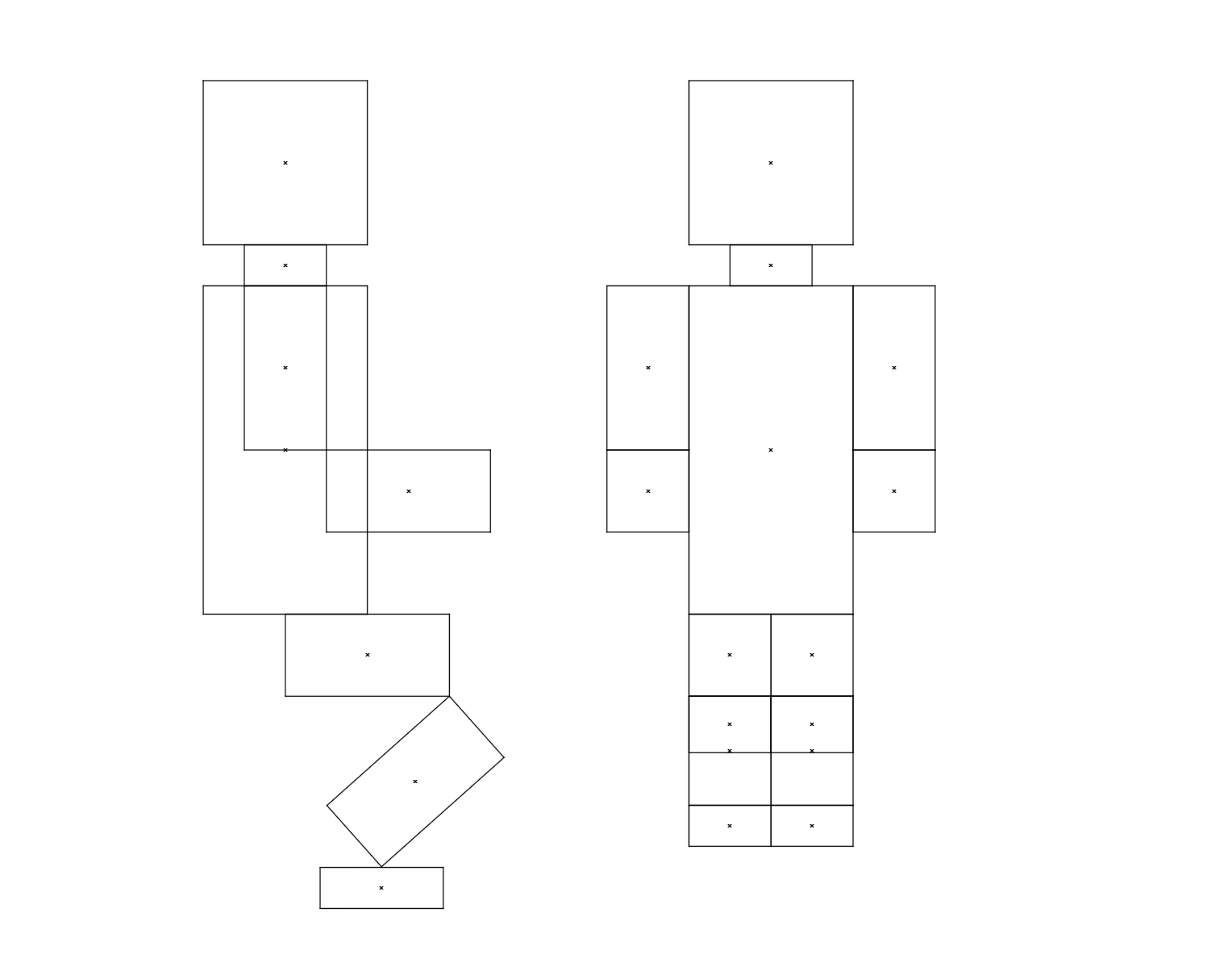
いきなり立体風に描いたことが間違いで、まず平面図と側面図を描く。設計だな…と思いながら、とりあえず描く。
物づくりの基本であって、平面から立体にするには、こういう視点が必要なんだと、感心してしまう。
これを知らずに描いてみると、遠近感も必要かと思って、余計な手を加えてしまい、遠近感となっているか微妙になった。あり得ない図になってしまったが、反省として載せてしまえ。
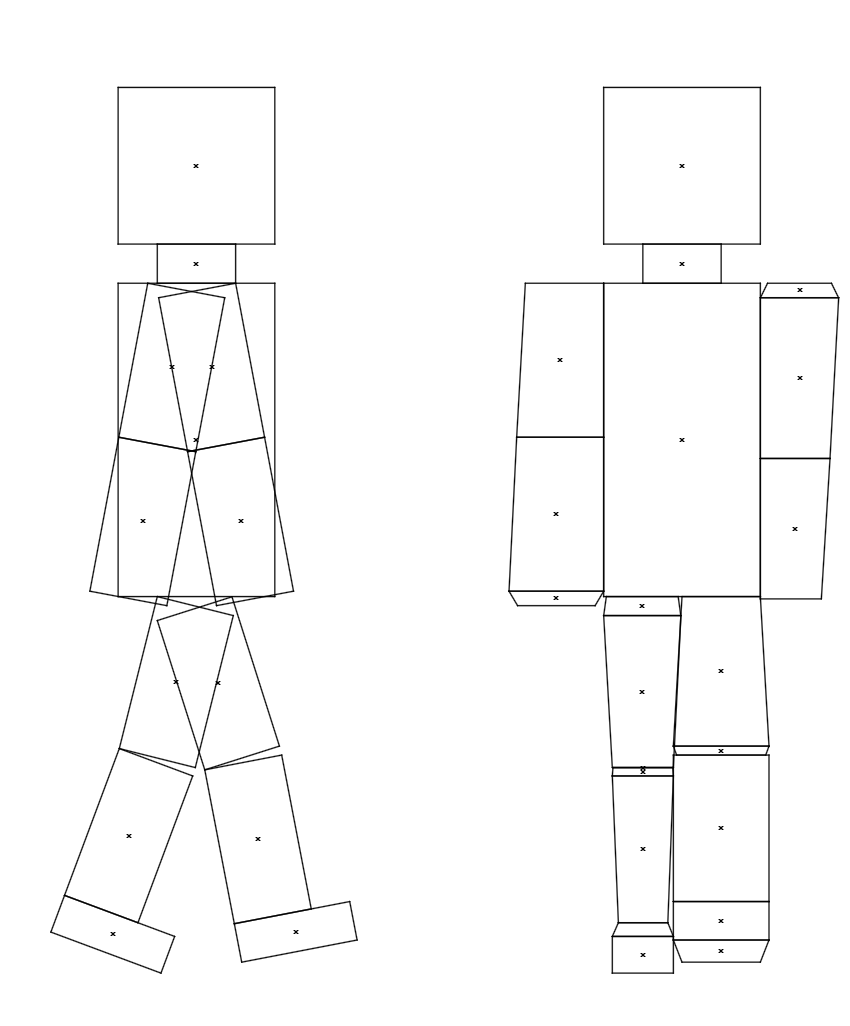
また、今回注文の人型ロボットは座っている&歩いている状態。よくあるロボット描画は立位が多く、「歩いているロボをどう描けばいいのかしら」と、上図のような迷走にもなった笑。

イラレの遠近グリッドの操作は慣れてきたものの、ロボ制作は迷宮入り。どこをつなげばいいのか、さっぱり見えないぞ笑
また、余計な遠近をつけてしまったので、平面のなかに複数の要素があるため、余計に線が見えないと思われた。
気を取り直して、平面図と側面図をシンプルに作成。
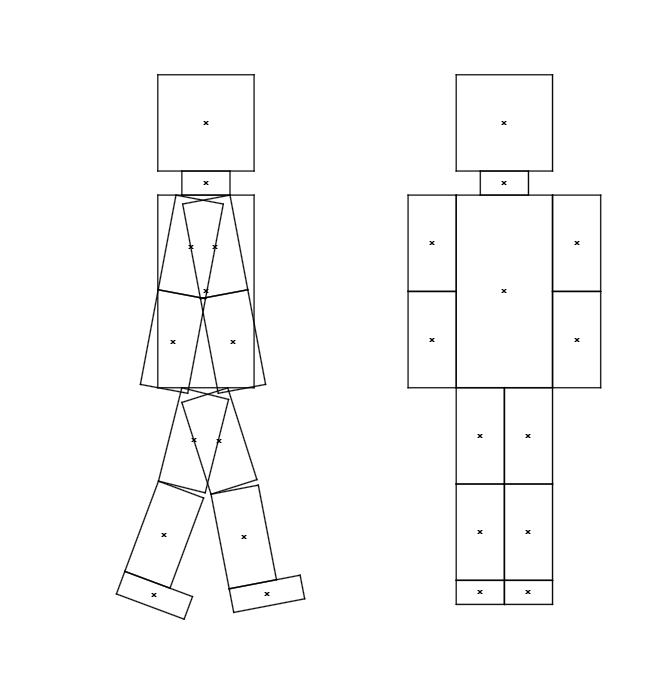
歩行だけれど、正面はシンプルに立位。余計な遠近はつけない。うまく行くか微妙だけれど、これで作成。
歩くロボット
途中経過。平面・側面図、超重要と気づかされた。

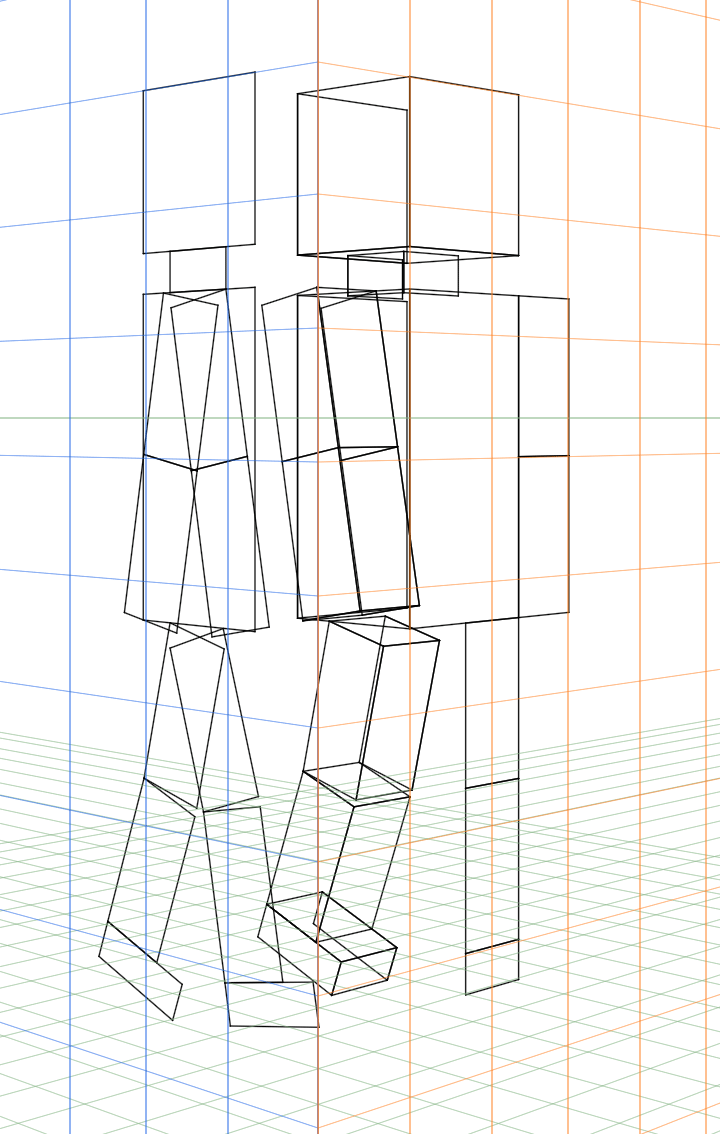
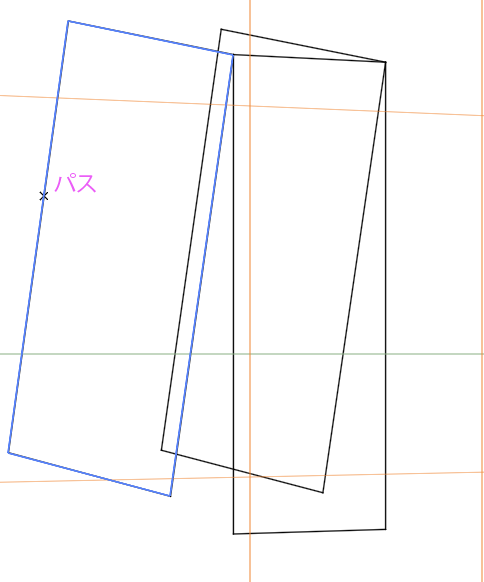
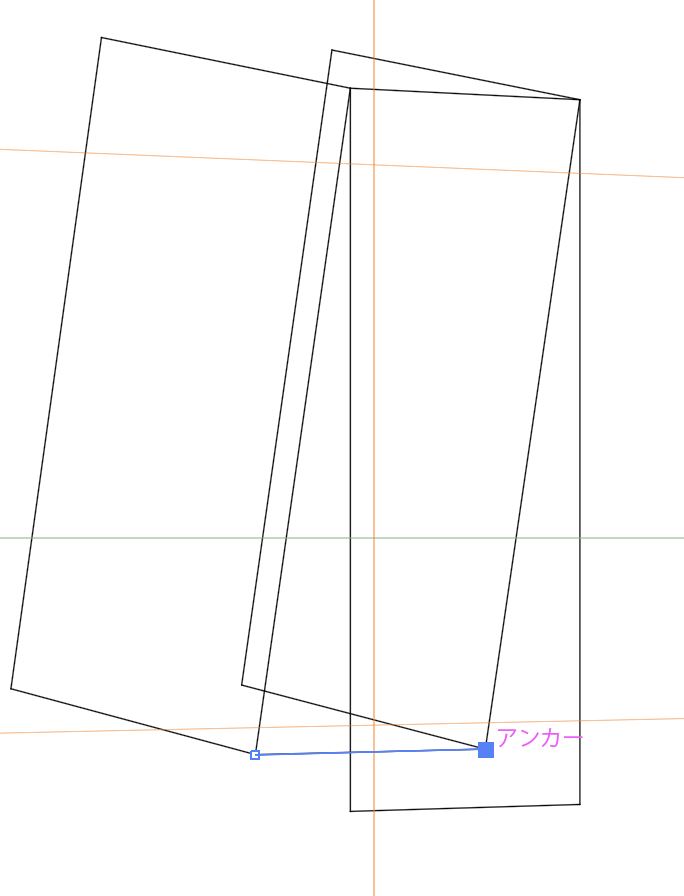
平面・側面図を奥にコピーする。今回は複雑かつ、きちんと描けていなかったかもしれないが、ややずれることが多くあった。ただ、気にして調整しても時間がかかるし、初めてなので、平面図からアタリをつけて大体の位置を決定した。
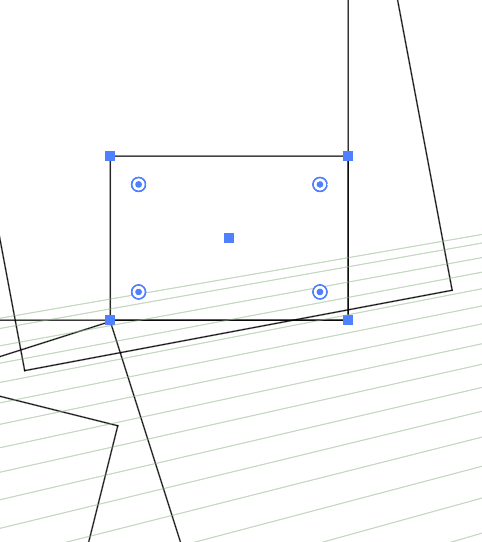
平面・側面図でアタリのためのブロックを作り、
遠近グリッド面に合わせる。これで大体の位置を決定出来たので、よいのかなと。
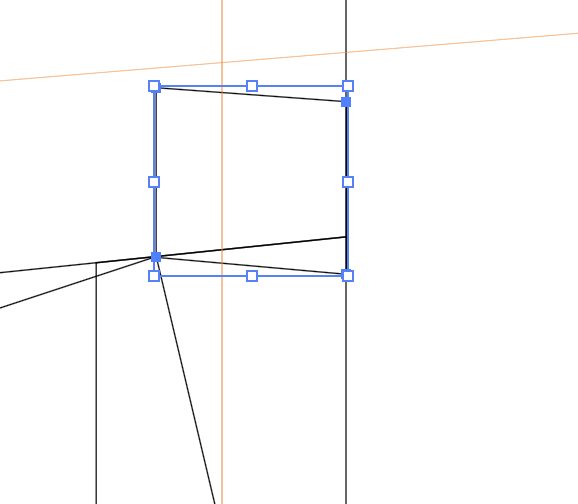
平面・側面図を几帳面に奥へコピーして配置していくと、線が増えて混乱しやすいのも問題。
それに気付いてから、アタリをつけて必要なところにコピーすれば、シンプルな配置になる。上図で言えば、斜めのブロックを作りたいけれど、側面図の斜めの長方形2枚の位置が決まれば、正面図は幅さえわかれば1枚で十分。
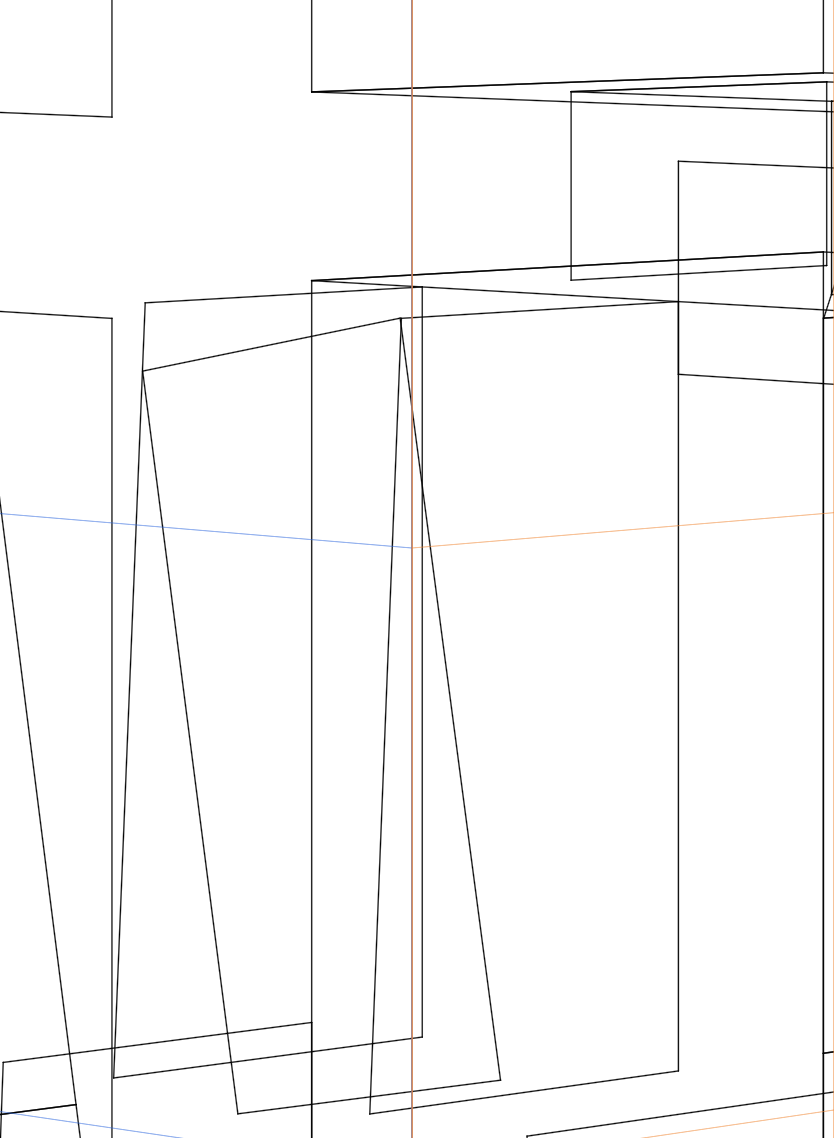
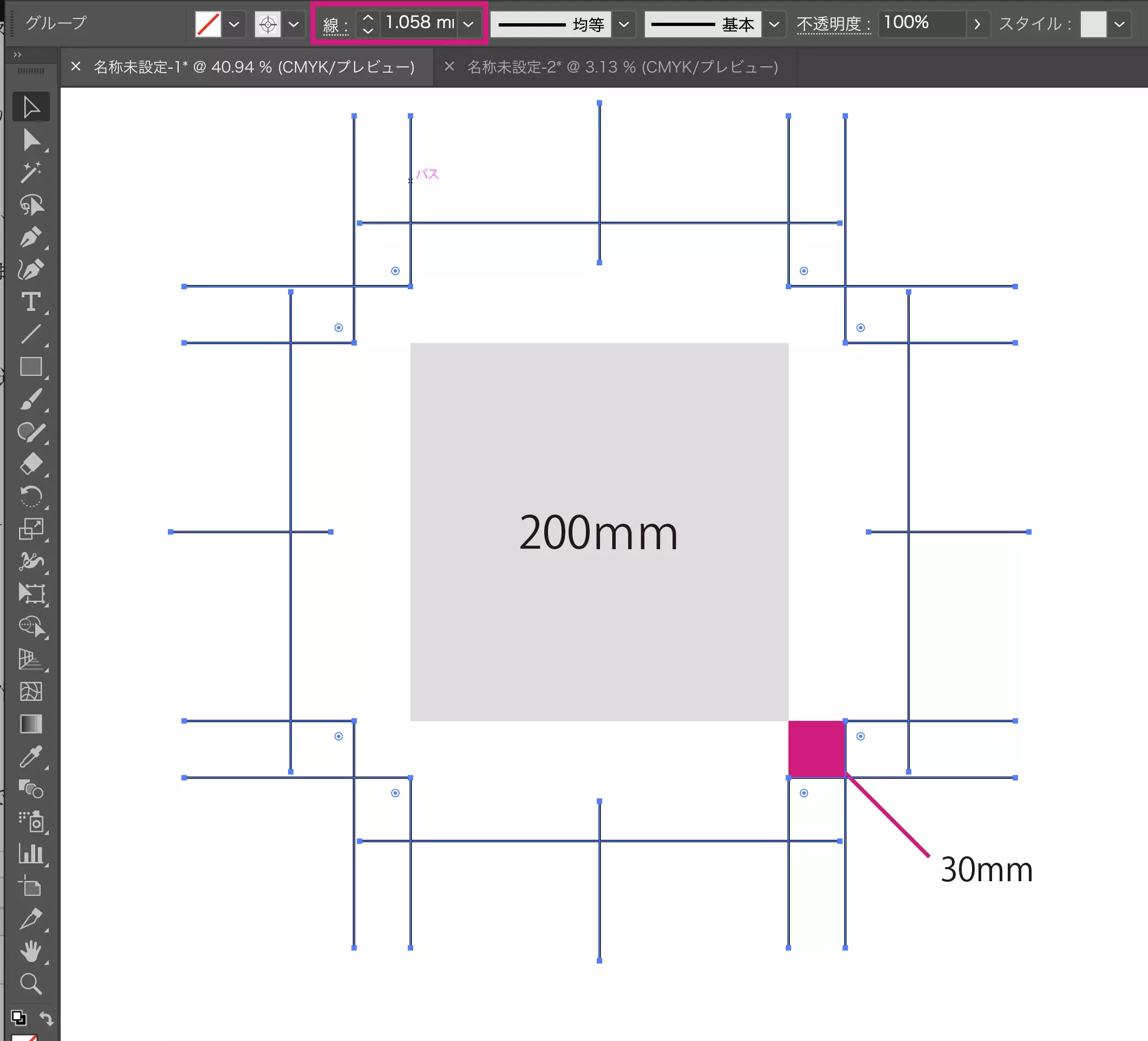
あとはペンツールで面を作るだけでOK。
ただ、遠近グリッドは吸着しないところもあり、基本アウトライン表示で作成。吸着させる必要がある場合は、ペンツールで直線を作ったりして吸着させたりした。
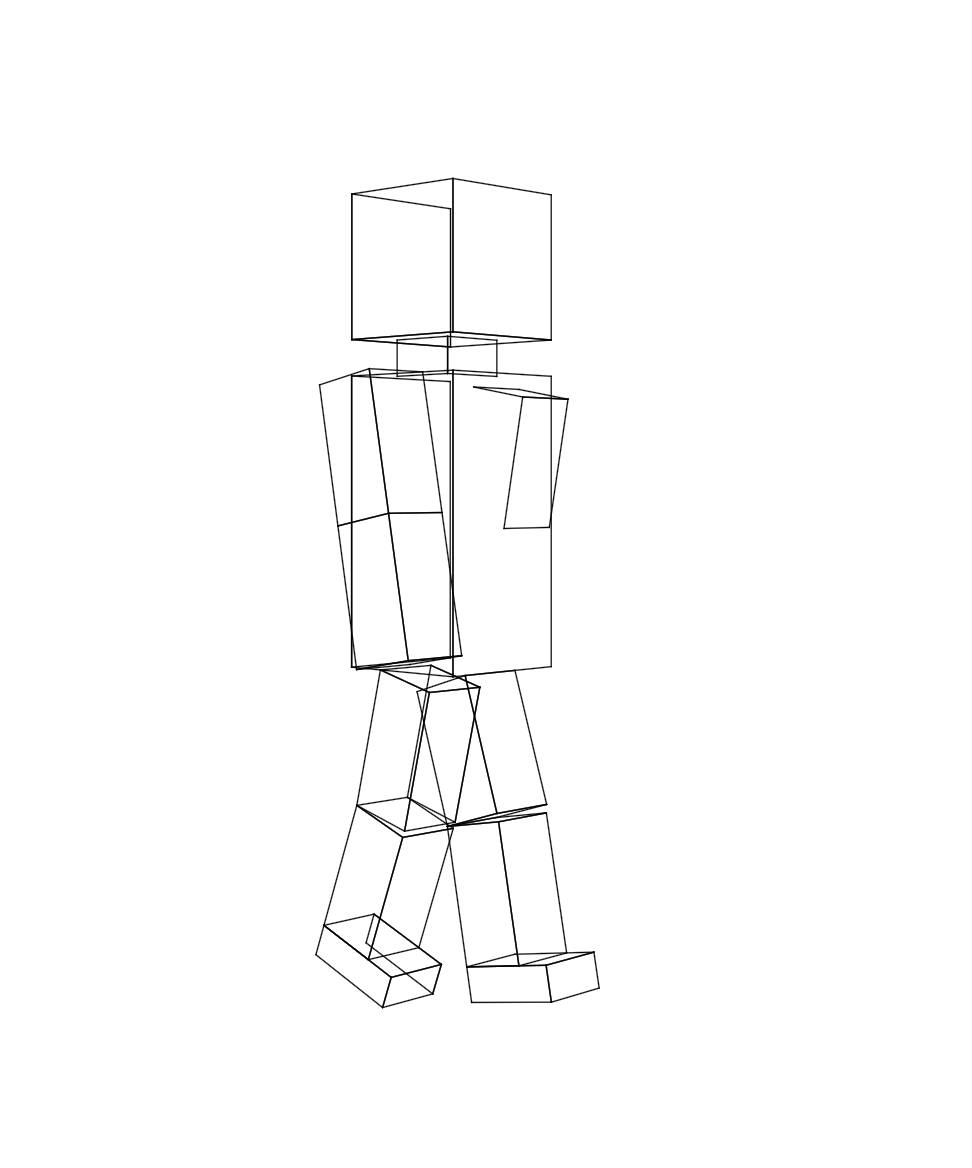
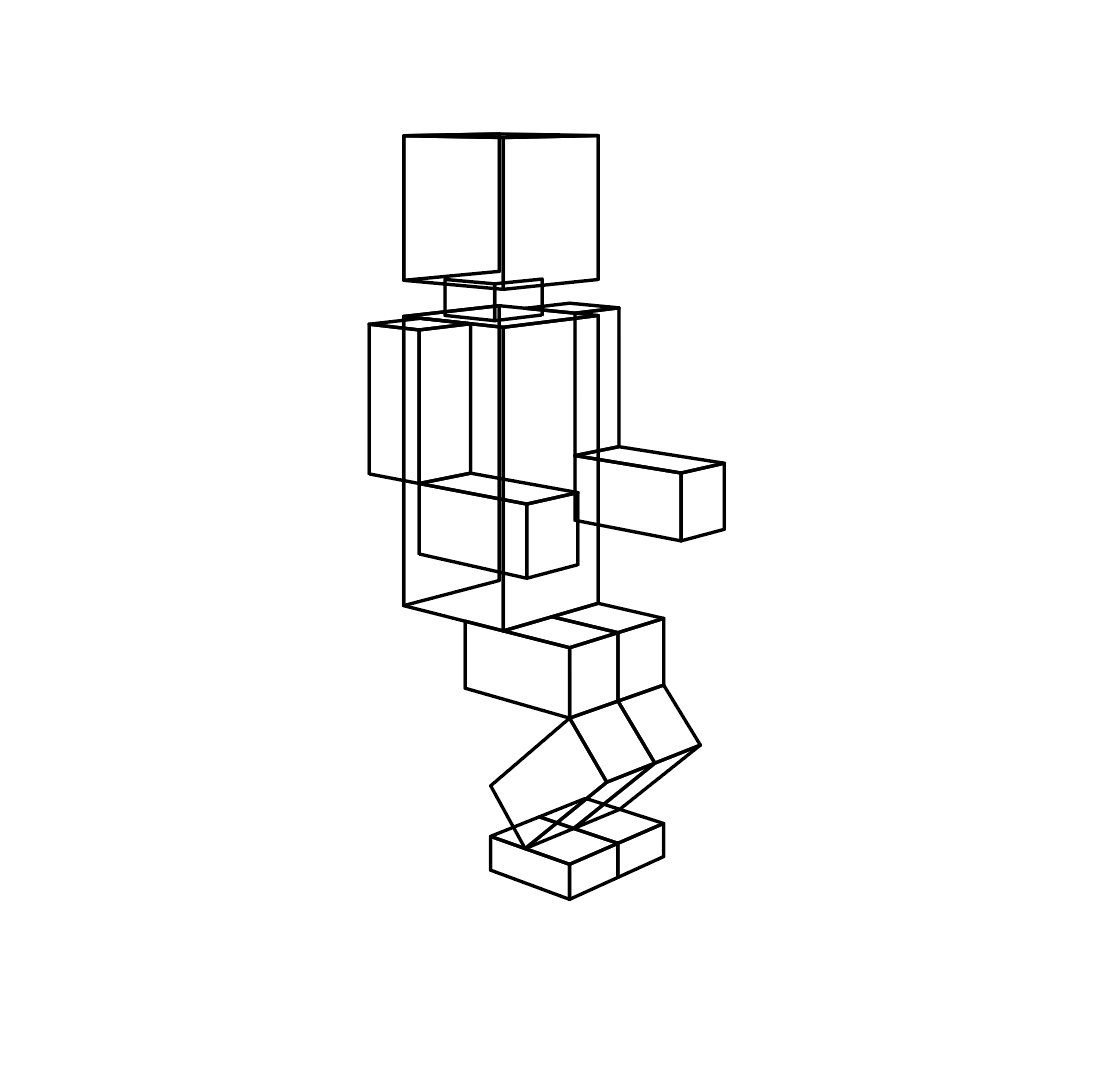
そして出来上がった歩くロボ。着色面だけあればいいので、背景に隠れる部分は削除。
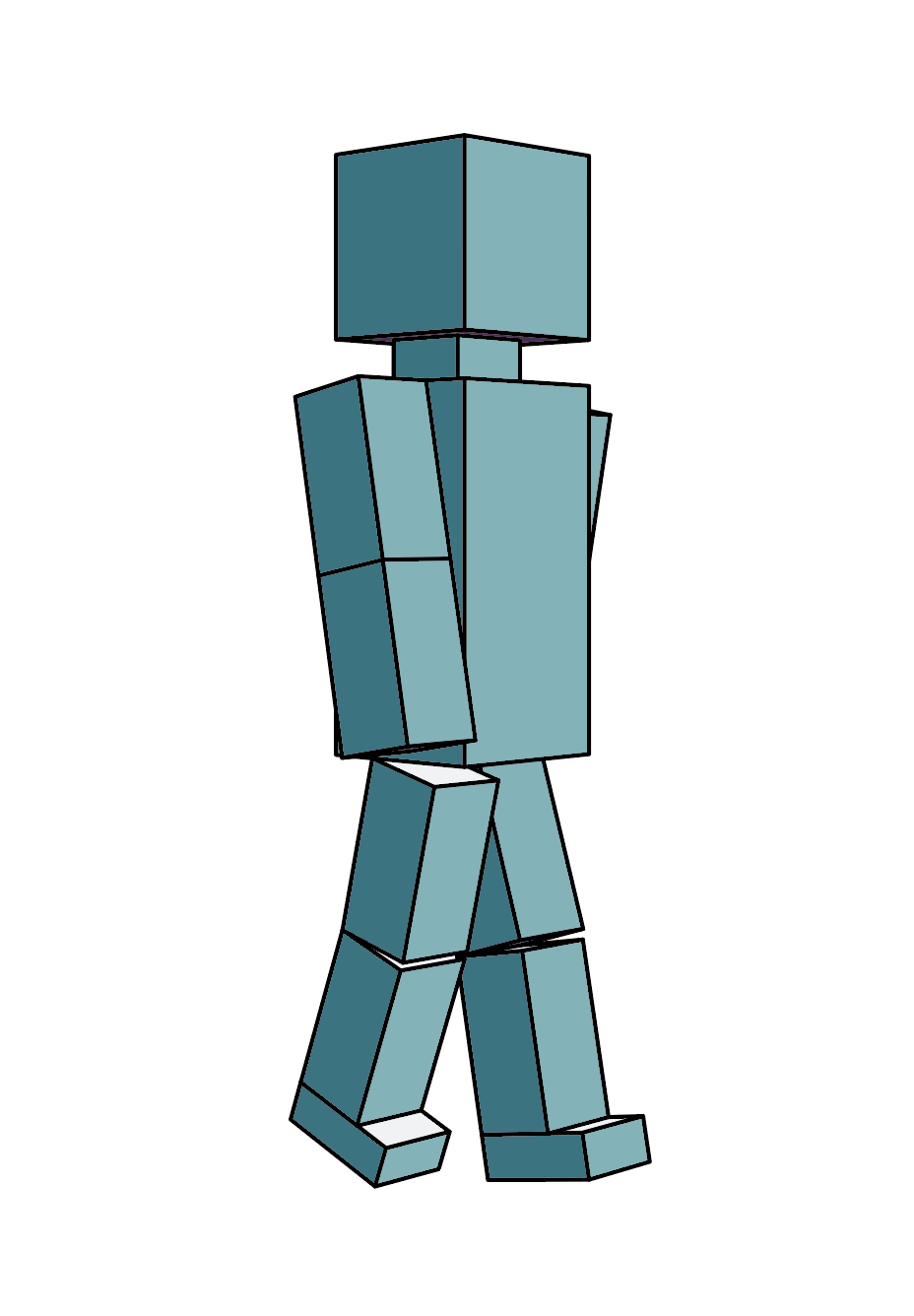
参考サイト紹介の、カラーセットから、ロボっぽいカラーリングで着色。
結果はどうであれば、立体ロボを作ることが出来た達成感。ドラクエの呪文を覚えた様な嬉しさ。自分手描きだけでは、絶対作れない。
座るロボ
続いて、座っているロボ。
同じく平面と側面図を作成するが、脚はどうしようと考える。描き方に問題がある様に思うけれど、時間を描けるより、イメージできていればいいかと、これで作成笑。
これを見て、生物の関節は素晴らしいなと感心する。生物の関節には「転がり」と「滑り」があるから、上図のロボの様に図太くならず、スマートな形状をしている。ロボの関節は「転がり」しかないので、パーツとパーツの隙間が大きい。
やれば出来るもんだ!微妙なポーズだけれど、目的があるので、とりあえず現在公開できるのはここまでに。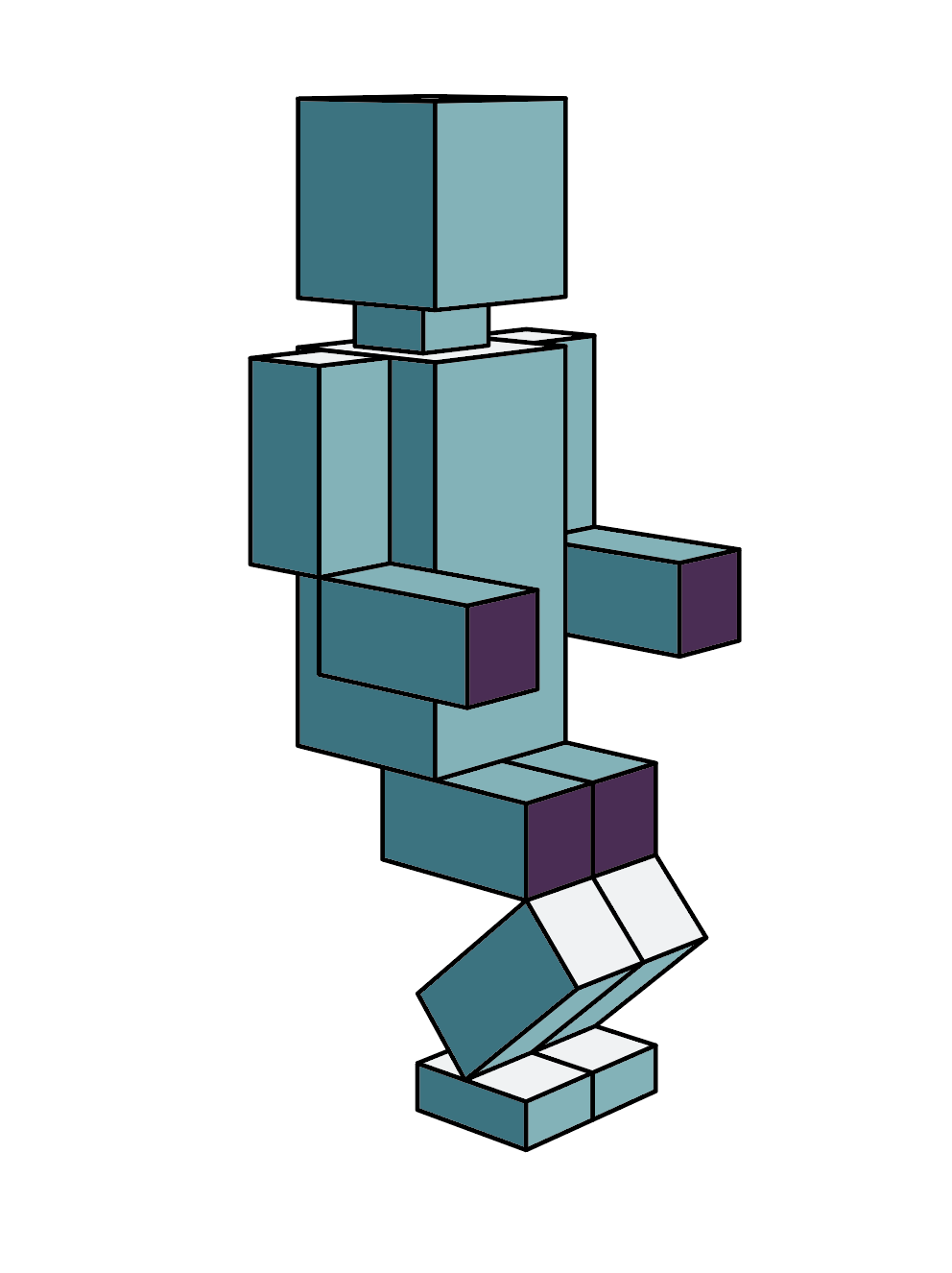
着色してみる。ロボットのカラーリングって空気感があるなぁと思い、ガンダムなどを思い浮かべると、すごい世界観だと興味が湧いた。
まとめ
以前、デッサンで感じた立体感のずれは、こういう視点がなかったからと、よーく分かった。この遠近感を心得ていないと、立体的なイラストはいつまでも妙な形になりそうだ。デッサンから学べたかもしれないし、今回はイラレから学べたので、今後また視点が広がるといいなぁと思った。
大変参考になりました。

Comment